
TPMS - Galerie 3
In dieser Galerie sind für diverse TPMS (s. rechts) folgende Objekte dargestellt:
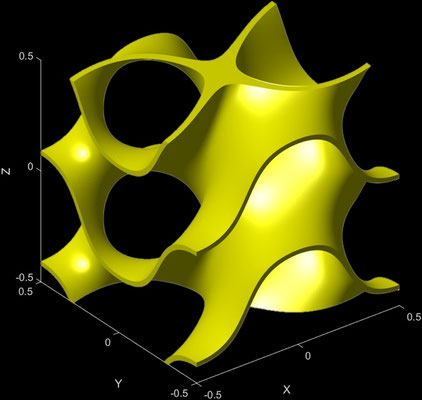
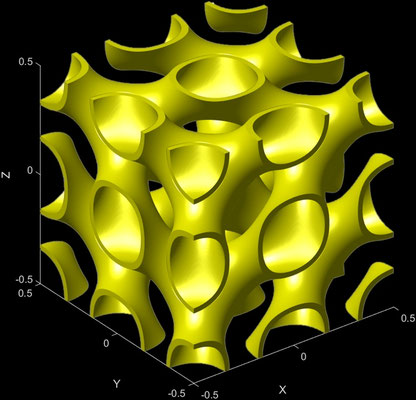
- TPMS mit ϕ (x,y,z) = 0
- Sheet mit | ϕ (x,y,z) | ≤ c, c ∈ |R+
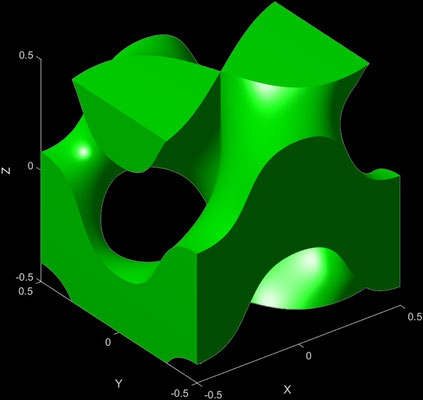
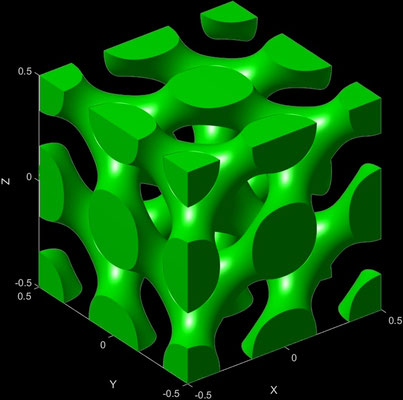
- Solid A mit ϕ (x,y,z) > 0
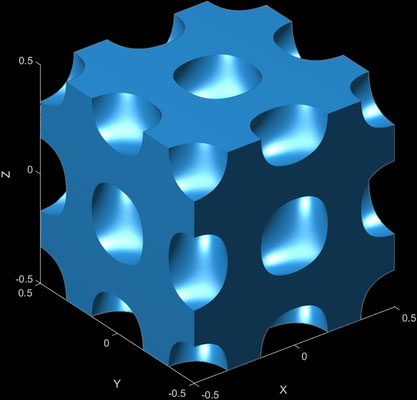
- Solid B mit ϕ (x,y,z) < 0
(s. dazu auch TPMS – Grundlagen) und ggf. weitere Grafiken.
Die TPMS wurde mit dem Graphing Calculator 3D, die anderen Objekte wurden mit MSLattice erzeugt, wobei dessen Feature, eigene Funktionen definieren zu können, verwendet wurde.
- D
- P
- Neovius
- IWP
- FRD
- OCTO
- C(D)
- Gyroid
- C(G)
- S
- C(S)
- Y
- C(Y)
- ±Y
- C(±Y)
- I2-Y**
- C(I2-Y**)
- D'
- G'
- K
- Lidinoid
- P+C(P)
Anstatt zu scrollen kann man durch Anklicken eines TPMS-Namens in den Spalten oben rechts direkt zur gewünschten TPMS (oder auch direkt in die Galerie 1 oder Galerie 3) springen.
Für eigene Experimente findet die interessierte Leserschaft am Ende der Seite die TPMS-Funktionen in gewohnter Syntax und spezieller MSLattice-Syntax für Copy & Paste.
Slotted−P
−2 (CxCy + CyCz + CxCz) − 2(C2x + C2y + C2z) + (C2xCy + C2yCz + CxC2z) − (CxC2y + CyC2z + C2xCz) = t
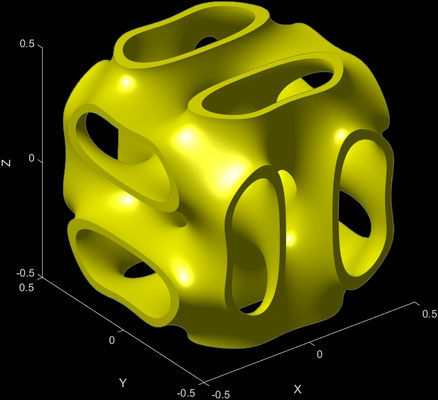


Slotted-P - Sheet
Slotted-P - Solid A
Slotted-P - Solid B
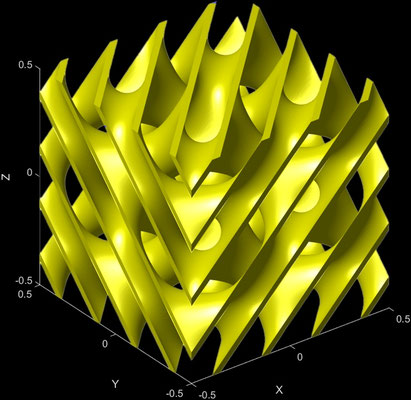
Split−P
1.1 (S2xCySz + S2yCzSx +
S2zCxSy) − 0.2 (C2xC2y + C2yC2z + C2zC2x) −
0.4 (C2x + C2y +C2z) = t
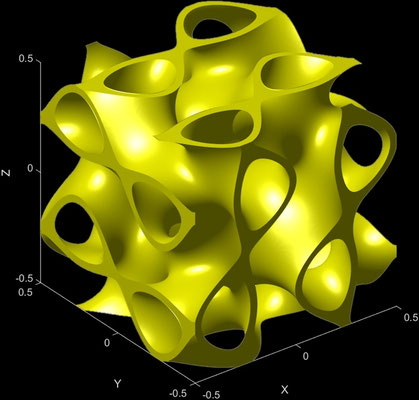
Split-P - Sheet
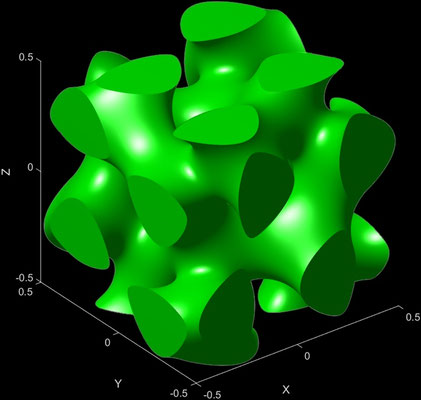
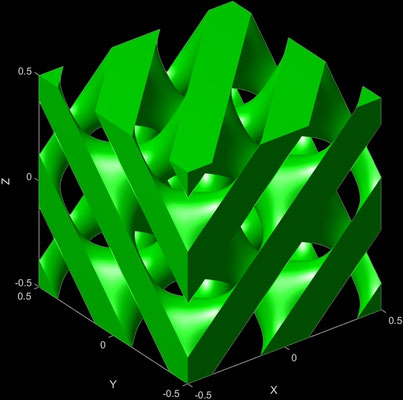
Split-P - Solid A
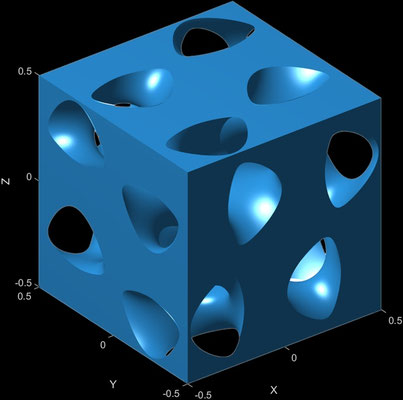
Split-P - Solid B
Q*
(Cx – 2 Cy) Cz − √3 Sz (Cx−y − Cx) + Cx−yCz = t

Q* - Sheet
Q* - Solid A
Q* - Solid B
W • W*
(C2xCy + C2yCz +CxC2z) − (CxC2y + CyC2z + C2xCz) = t



W - Sheet
W - Solid A
W - Solid B
F • F*, Tripleplane 1
Cx Cy Cz = t
P - Isosurface



F - Sheet
F - Solid A
F - Solid B
Double D
(S2xS2y + S2yS2z +S2zS2x) + C2xC2yC2z = t

Double D - Sheet
Double D - Solid A
Double D - Solid B
Variante: C2xC2y + C2yC2z + C2xC2z + S2xS2yS2z = t
Double D2 - Sheet
Double D2 - Solid A
Double D2 - Solid B
Double G
2.75 (S2xCySz + S2yCxSz + S2zSyCx) − (C2xC2y + C2yC2z + C2zC2x) = t



Double G - Sheet
Double G - Solid A
Double G - Solid B
Double P
½ (CxCy + CyCz + CzCx) + 0.2 (C2x + C2y + C2z) = t



Double P - Sheet
Double P - Solid A
Double P - Solid B
Tubular D
10(S{x}S{y}S{z} + S{x}C{y}C{z} + C{x}S{y}C{z} + C{x}C{y}S{z}) − 0.7(C4x +C4y +C4z) – 11 = t
mit {x} = x − π/4, {y} = y − π/4, {z} = z − π/4


Tubular D - Sheet
Tubular D -Sheet, -1 ≤ z ≤ 1
Tubular G
10 (CxSy + CySz + CzSx) − 0.5 (C2xC2y + C2yC2z + C2zC2x) – 14 = t


Tubular G - Sheet
Tubular G - Sheet, -1 ≤ z ≤ 1
Tubular P
10 (Cx + Cy + Cz) − 5.1 (CxCy + CyCz + CzCx) − 14.6 = 0


Tubular P - Sheet
Tubular P - Sheet, -1 ≤ z ≤ 1
| TPMS | ϕTPMS | F(x,y,z) für MSLattice | p | c |
| D' |
0.5(cos(px)cos(py)cos(pz)+cos(px)sin(py)sin(pz)+sin(px)cos(py)sin(pz)+ sin(px)sin(py)cos(pz))-0.5(sin(2px)sin(2py)+sin(2py)sin(2pz)+sin(2pz)sin(2px))−0.2=0
0.5.*(cos(2.*pi.*x).*cos(2.*pi.*y).*cos(2.*pi.*z)+cos(2.*pi.*x).*sin(2.*pi.*y).*sin(2.*pi.*z)+ sin(2.*pi.*x).*cos(2.*pi.*y).*sin(2.*pi.*z)+sin(2.*pi.*x).*sin(2.*pi.*y).*cos(2.*pi.*z))- 0.5.*(sin(2.*pi.*2.*x).*sin(2.*pi.*2.*y)+sin(2.*pi.*2.*y).*sin(2.*pi.*2.*z)+ sin(2.*pi.*2.*z).*sin(2.*pi.*2.*x))-0.2 Variante: 0.5(sin(px)sin(py)sin(pz)+cos(px)cos(py)cos(pz))–0.5(cos(2px)cos(2py)+cos(2py)cos(2pz)+cos(2pz)cos(2px))–0.2=0
0.5.*(sin(2.*pi.*x).*sin(2.*pi.*y).*sin(2.*pi.*z)+cos(2.*pi.*x).*cos(2.*pi.*y).*cos(2.*pi.*z))- 0.5.*(cos(2.*pi.*2.*x).*cos(2.*pi.*2.*y)+cos(2.*pi.*2.*y).*cos(2.*pi.*2.*z)+ cos(2.*pi.*2.*z).*cos(2.*pi.*2.*x))-0.2 |
2π |
0.1
0.15
|
| G' |
sin(2px)cos(py)sin(pz)+sin(px)sin(2py)cos(pz)+cos(px)sin(py)sin(2pz)+0.32=0
sin(pi.*2.*x).*cos(pi.*y).*sin(pi.*z)+sin(pi.*x).*sin(pi.*2.*y).*cos(pi.*z)+ cos(pi.*x).*sin(pi.*y).*sin(pi.*2.*z)+0.32
Variante: 5(sin(2px)cos(py)sin(pz)+sin(px)sin(2py)cos(pz)+cos(px)sin(py)sin(2pz))+ (cos(2px)cos(2py)+cos(2py)cos(2pz)+cos(2pz)cos(2px))=0
5.*(sin(pi.*2.*x).*cos(pi.*y).*sin(pi.*z)+ sin(pi.*x).*sin(pi.*2.*y).*cos(pi.*z)+cos(pi.*x).*sin(pi.*y).*sin(pi.*2.*z))+ (cos(pi.*2.*x).*cos(pi.*2.*y)+cos(pi.*2.*y).*cos(pi.*2.*z)+ cos(pi.*2.*z).*cos(pi.*2.*x))
|
2π | 0.1 |
| K |
0.3(cos(px)+cos(py)+cos(pz))+0.3(cos(px)cos(py)+cos(py)cos(pz)+cos(pz)cos(px))− 0.4(cos(2px)+cos(2py)+cos(2pz))+0.2=t
0.3.*(cos(2.*pi.*x)+cos(2.*pi.*y)+cos(2.*pi.*z))+0.3.*(cos(2.*pi.*x).*cos(2.*pi.*y)+ cos(2.*pi.*y).*cos(2.*pi.*z)+cos(2.*pi.*z).*cos(2.*pi.*x))-0.4.*(cos(2.*2.*pi.*x)+ cos(2.*2.*pi.*y)+cos(2.*2.*pi.*z))+0.2 |
2π | 0.1 |
| Lidinoid |
(sin(2x)cos(y)sin(z)+sin(2y)cos(z)sin(x)+sin(2z)cos(x)sin(y))− (cos(2x)cos(2y)+cos(2y)cos(2z)+cos(2z)cos(2x))+0.3=t
sin(2.*pi.*2.*x).*cos(2.*pi.*y).*sin(2.*pi.*z)+sin(2.*pi.*2.*y).*cos(2.*pi.*z).*sin(2.*pi.*x)+ sin(2.*pi.*2.*z).*cos(2.*pi.*x).*sin(2.*pi.*y)-(cos(2.*pi.*2.*x).*cos(2.*pi.*2.*y)+ cos(2.*pi.*2.*y).*cos(2.*pi.*2.*z)+cos(2.*pi.*2.*z).*cos(2.*pi.*2.*x))+0.3=t |
2π | 0.25 |
| P+C(P) |
0.3(cos(px)cos(py)cos(pz))+0.2(cos(px)+cos(py)+cos(pz))+ 0.1(cos(2px)cos(2py)cos(2pz))+0.1(cos(2px)+cos(2py)+cos(2pz))+ 0.05(cos(3px)+cos(3py)+cos(3pz))+0.1(cos(px)cos(py)+ cos(py)cos(pz)+cos(pz)cos(px))=t
0.3.*(cos(2.*pi.*x).*cos(2.*pi.*y).*cos(2.*pi.*z))+0.2.*(cos(2.*pi.*x)+cos(2.*pi.*y)+ cos(2.*pi.*z))+0.1.*(cos(2.*pi.*2.*x).*cos(2.*pi.*2.*y).*cos(2.*pi.*2.*z))+ 0.1.*(cos(2.*pi.*2.*x)+cos(2.*pi.*2.*y)+cos(2.*pi.*2.*z))+0.05.*(cos(2.*pi.*3.*x)+ cos(2.*pi.*3.*y)+cos(2.*pi.*3.*z))+0.1.*(cos(2.*pi.*x).*cos(2.*pi.*y)+ cos(2.*pi.*y).*cos(2.*pi.*z)+cos(2.*pi.*z).*cos(2.*pi.*x)) |
2π | .05 |
| Slotted-P |
−2(cos(px)cos(py)+cos(py)cos(pz)+cos(px)cos(pz))−2(cos(2px)+cos(2py)+ cos(2pz))+(cos(2px)cos(py)+cos(2py)cos(pz)+cos(px)cos(2pz))− (cos(px)cos(2py)+cos(py)cos(2pz)+cos(2px)cos(pz))=t
-2.*(cos(2.*pi.*x).*cos(2.*pi.*y)+cos(2.*pi.*y).*cos(2.*pi.*z)+cos(2.*pi.*x).*cos(2.*pi.*z))- 2.*(cos(2.*2.*pi.*x)+cos(2.*2.*pi.*y)+cos(2.*2.*pi.*z))+(cos(2.*2.*pi.*x).*cos(2.*pi.*y)+ cos(2.*2.*pi.*y).*cos(2.*pi.*z)+cos(2.*pi.*x).*cos(2.*2.*pi.*z))-(cos(2.*pi.*x).*cos(2.*2.*pi.*y)+ cos(2.*pi.*y).*cos(2.*2.*pi.*z)+cos(2.*2.*pi.*x).*cos(2.*pi.*z)) |
2π | 0.75 |
| Split-P |
1.1(sin(2px)cos(py)sin(pz)+sin(2py)cos(pz)sin(px)+sin(2pz)cos(px)sin(py))− 0.2(cos(2px)cos(2py)+cos(2py)cos(2pz)+cos(2pz)cos(2px))−0.4(cos(2px)+ cos(2py)+cos(2pz))=t
1.1.*(sin(2.*2.*pi.*x).*cos(2.*pi.*y).*sin(2.*pi.*z)+ sin(2.*2.*pi.*y).*cos(2.*pi.*z).*sin(2.*pi.*x)+sin(2.*2.*pi.*z).*cos(2.*pi.*x).*sin(2.*pi.*y))- 0.2.*(cos(2.*2.*pi.*x).*cos(2.*2.*pi.*y)+cos(2.*2.*pi.*y).*cos(2.*2.*pi.*z)+ cos(2.*2.*pi.*z).*cos(2.*2.*pi.*x))-0.4.*(cos(2.*2.*pi.*x)+cos(2.*2.*pi.*y)+ cos(2.*2.*pi.*z)) |
2π | 0.25 |
| Q* |
(cos(px)-2cos(py))cos(pz)-sqrt(3)sin(pz)(cos(px-py)-cos(px))+cos(px-py)cos(pz)=t
(cos(2.*pi.*x)-2.*cos(2.*pi.*y)).*cos(2.*pi.*z)-sqrt(3).*sin(2.*pi.*z).*(cos(2.*pi.*(x-y))-cos(2.*pi.*x))+cos(2.*pi.*(x-y)).*cos(2.*pi.*z) |
2π | 0.25 |
| W |
(cos(2px)cos(py)+cos(2py)cos(pz)+cos(px)cos(2pz))-(cos(px)cos(2py)+cos(py)cos(2pz)+cos(2px)cos(pz))=t
(cos(2.*2.*pi.*x).*cos(2.*pi.*y)+cos(2.*2.*pi.*y).*cos(2.*pi.*z)+ cos(2.*pi.*x).*cos(2.*2.*pi.*z))-(cos(2.*pi.*x).*cos(2.*2.*pi.*y)+ cos(2.*pi.*y).*cos(2.*2.*pi.*z)+cos(2.*2.*pi.*x).*cos(2.*pi.*z)) |
2π | 0.1 |
| F |
cos(px) cos(py) cos(pz) = 0
cos(2.*pi.*x).*cos(2.*pi.*y).*cos(2.*pi.*z) |
2π | 0.1 |
| Double D |
(sin(2px)sin(2py)+sin(2py)sin(2pz)+sin(2pz)sin(2px))+cos(2px)cos(2py)cos(2pz)=t
(sin(2.*2.*pi.*x).*sin(2.*2.*pi.*y)+sin(2.*2.*pi.*y).*sin(2.*2.*pi.*z)+ sin(2.*2.*pi.*z).*sin(2.*2.*pi.*x))+cos(2.*2.*pi.*x).*cos(2.*2.*pi.*y).*cos(2.*2.*pi.*z)
Variante: cos(px)cos(py)+cos(py)cos(pz)+cos(px)cos(pz)+sin(2px)sin(2py)sin(2pz)=t
cos(2.*2.*pi.*x).*cos(2.*2.*pi.*y)+cos(2.*2.*pi.*y).*cos(2.*2.*pi.*z)+ cos(2.*2.*pi.*x).*cos(2.*2.*pi.*z)+sin(2.*2.*pi.*x).*sin(2.*2.*pi.*y).*sin(2.*2.*pi.*z) |
2π | 0.25 |
| Double G |
2.75(sin(2px)cos(py)sin(pz)+sin(2py)cos(px)sin(pz)+sin(2pz)sin(py)cos(px))- (cos(2px)cos(2py)+cos(2py)cos(2pz)+cos(2pz)cos(2px))=t
2.75.*(sin(2.*2.*pi.*x).*cos(2.*pi.*y).*sin(2.*pi.*z)+ sin(2.*2.*pi.*y).*cos(2.*pi.*x).*sin(2.*pi.*z)+ sin(2.*2.*pi.*z).*sin(2.*pi.*y).*cos(2.*pi.*x))-(cos(2.*2.*pi.*x).*cos(2.*2.*pi.*y)+cos(2.*2.*pi.*y).*cos(2.*2.*pi.*z)+ cos(2.*2.*pi.*z).*cos(2.*2.*pi.*x)) |
2π | 0.25 |
| Double P |
0.5(cos(px)cos(py)+cos(py)cos(pz)+cos(pz)cos(px))+0.2(cos(2px)+cos(2py)+cos(2pz))=t
0.5.*(cos(2.*pi.*x) .*cos(2.*pi.*y)+cos(2.*pi.*y) .*cos(2.*pi.*z)+ cos(2.*pi.*z) .*cos(2.*pi.*x))+0.2.*(cos(2.*2.*pi.*x)+cos(2.*2.*pi.*y)+cos(2.*2.*pi.*z)) |
2π | 0.1 |
| Tubular D |
10(sin(x−π/4)sin(y−π/4)sin(z−π/4)+sin(x−π/4)cos(y−π/4)cos(z−π/4)+ cos(x−π/4)sin(y−π/4)cos(z−π/4)+cos(x−π/4)cos(y−π/4)sin(z−π/4))− 0.7(cos(4x)+cos(4y)+cos(4z))−11
10.*(sin(2.*pi.*x-pi/4).*sin(2.*pi.*y-pi/4).*sin(2.*pi.*z-pi/4)+ sin(2.*pi.*x-pi/4).*cos(2.*pi.*y-pi/4).*cos(2.*pi.*z-pi/4)+ cos(2.*pi.*x-pi/4).*sin(2.*pi.*y-pi/4).*cos(2.*pi.*z-pi/4)+ cos(2.*pi.*x-pi/4).*cos(2.*pi.*y-pi/4).*sin(2.*pi.*z-pi/4))- 0.7.*(cos(2.*pi.*4.*x)+cos(2.*pi.*4.*y)+cos(2.*pi.*4.*z))-11 |
2π | 0.15 |
| Tubular G |
10(cos(px)sin(py)+cos(py)sin(pz)+cos(pz)sin(px))−0.5(cos(2px)cos(2py)+ cos(2py)cos(2pz)+cos(2pz)cos(2px))−14
10.*(cos(2.*pi.*x).*sin(2.*pi.*y)+cos(2.*pi.*y).*sin(2.*pi.*z)+ cos(2.*pi.*z).*sin(2.*pi.*x))-0.5.*(cos(2.*2.*pi.*x).*cos(2.*2.*pi.*y)+ cos(2.*2.*pi.*y).*cos(2.*2.*pi.*z)+cos(2.*2.*pi.*z).*cos(2.*2.*pi.*x))-14 |
2π | 0.15 |
| Tubular P |
10(cos(px)+cos(py)+cos(pz))−5.1(cos(px)cos(py)+cos(py)cos(pz)+cos(pz)cos(px))−14.6
10.*(cos(2.*pi.*x)+cos(2.*pi.*y)+cos(2.*pi.*z))-5.1.*(cos(2.*pi.*x).*cos(2.*pi.*y)+ cos(2.*pi.*y).*cos(2.*pi.*z)+cos(2.*pi.*z).*cos(2.*pi.*x))-14.6 |
2π | 0.15 |
| Bionic Bone |