
TPMS - Galerie 2
---------------- Direkt zur TPMS -----------------
In dieser Galerie finden Sie für diverse TPMS (s. rechts) Einheitszellen (engl. unit cells) der Objekte
- TPMS mit ϕ (x,y,z) = c als 360°-Animation
- Sheet mit | ϕ (x,y,z) | ≤ d, d ∈ |R+
- Solid A mit ϕ (x,y,z) > c
- Solid B mit ϕ (x,y,z) < c
für c = 0 und weitere Grafiken. Bezüglich der Nomenklatur und Erzeugung siehe TPMS – Einführung.
Für eigene Experimente enthält die Tabelle am Ende der Seite die TPMS-Funktionen in gewohnter Syntax und MSLattice-Syntax für ein schnelles Copy & Paste.
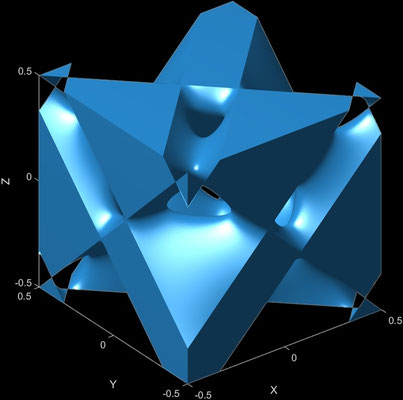
C (D) • C (D∗), Complementary D
ϕ (x,y,z) = C3x+yCz − S3x−ySz + Cx+3yCz + Sx−3ySz + Cx−yC3z − Sx+yS3z
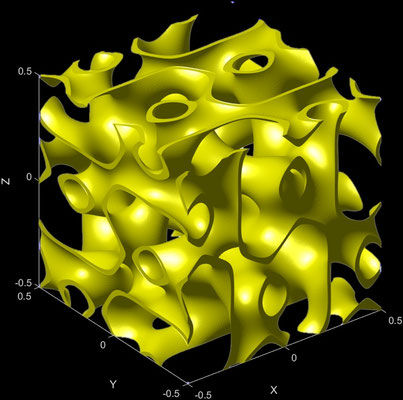
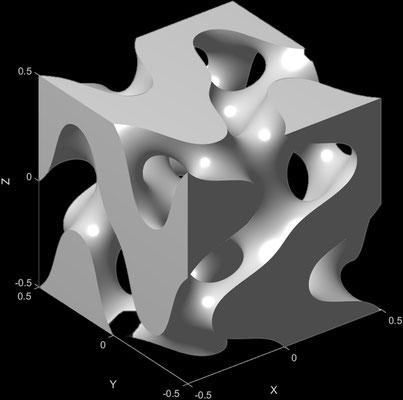
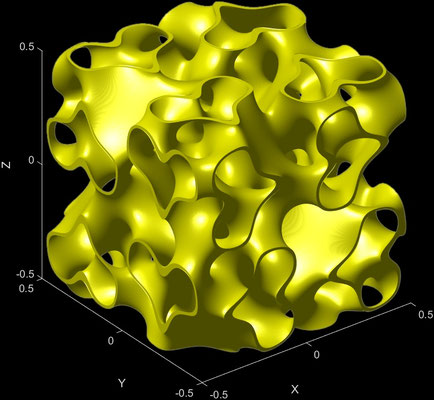
C (D) - TPMS
C (D) - TPMS ('Rainbow')


C (D) - Sheet
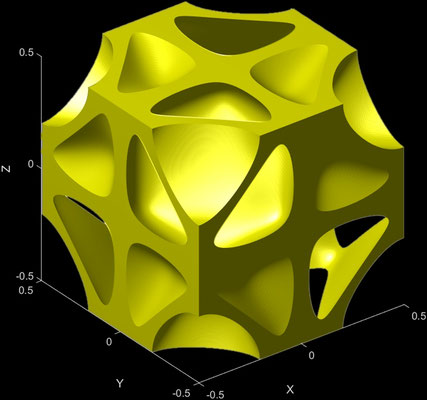
C( D) - Solid A
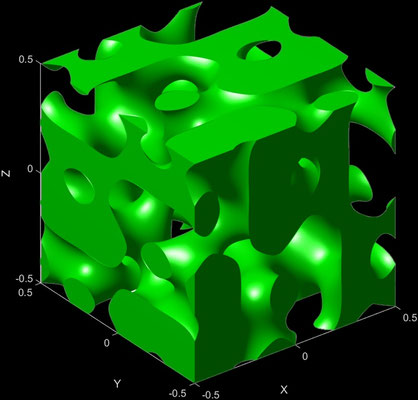
C (D) - Solid B
alternativ: ϕ (x,y,z) = C3xCyCz − S3xSySz + CxC3yCz − SxS3ySz + CxCyC3z − SxSyS3z
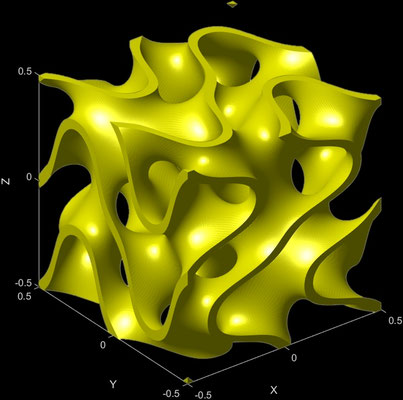
C (D) alternativ - TPMS
C (D) alternativ - TPMS ('Rainbow')


C (D) alternativ - Sheet
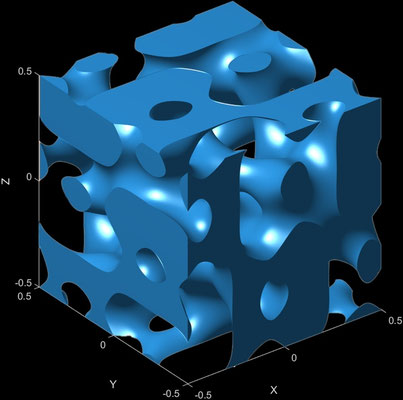
C (D) alternativ - Solid A
C (D) alternativ - Solid B
Gyroid • G Surface, Schoen G, Schoen Gyroid, Y*
ϕ (x,y,z) = CxSy + CySz + CzSx

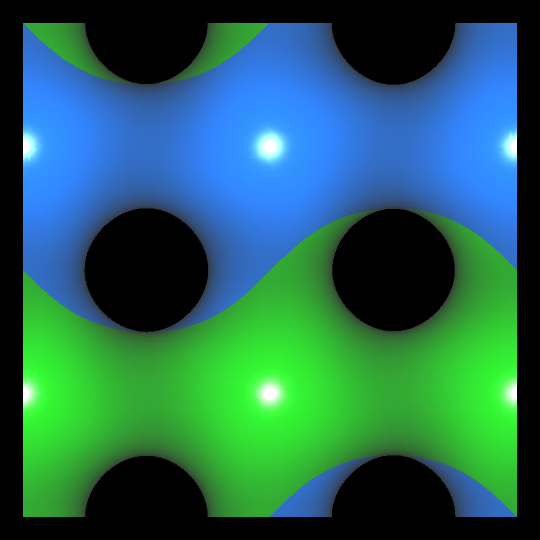






Gyroid - Sheet
Gyroid - Solid A
Gyroid - Solid B
Gyroid mit eingebetteten Zylindern
In der Grafik links wurden in die Gyroid-Einheitszelle 18 Halb-/Zylinder mit gleichem Radius eingebettet. Die Koordinatenwerte der Zylindermittelachsen sind Vielfache von 1/4, die Öffnungen im Gyroid sind jedoch nicht kreisrund (s.o. bei Ansichten der Unit Cell), so dass für den Radius r nicht der Wert 1/8 = 0.125 sondern 0.122 verwendet wurde und so die Gyroid-fläche nicht die Zylinder-wände durchdringt.
Schnittmenge aus Kugel mit r=1
und Gyroid mit p=4
C (G) • Complementary G, C(Y**), Complementary Y**
ϕ (x,y,z) = 3
(SxCy + SyCz + CxSz) + 2 (S3xCy + S3yCz + CxS3z) –
2 (SxC3y + SyC3z + C3xSz)
C (G) - TPMS
C (G) - Sheet
C (G) - Solid A
C (G) - Solid B
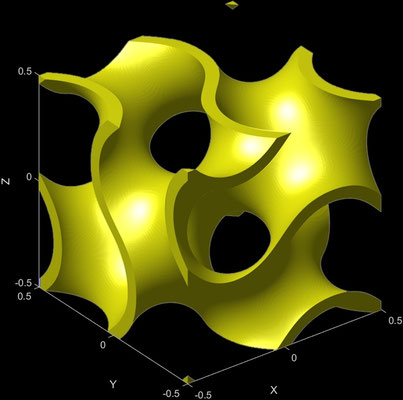
S • Fisher–Koch S, S*
ϕ (x,y,z) = C2xSyCz + CxC2ySz + SxCyC2z
S - TPMS
S - TPMS ('bunt')

S - Sheet
S - Solid A
S - Solid B
C (S) • Complementary S, Fisher–Koch C(S)
ϕ (x,y,z) = (C2x + C2y + C2z) + 2 (S3xS2yCz + CxS3yS2z + S2xCyS3z)
+
2 (S2xC3ySz + SxS2yC3z +
C3xSyS2z)
C (S) - TPMS, p=pi
C (S) - TPMS
C (S) - eine ♥-liche Fläche ;-)


C (S) - Sheet
C (S) - Solid A
C (S) - Solid B
Die folgende Tabelle enthält die Funktionen und Parameter mit denen die Flächen und Festkörper auf dieser Seite erstellt wurden. Die für eine Fläche jeweils angegebene zweite Funktion enthält die Zeichenfolge ".*" für die multiplikative Verknüpfung und kann so direkt in MSLattice eingefügt werden.
| TPMS | ϕTPMS | F(x,y,z) für MSLattice | p | d |
| C (D) |
cos(p(3x+y))cos(pz)−sin(p(3x−y))sin(pz)+cos(p(x+3y))cos(pz)+sin(p(x−3y))sin(pz)+ cos(p(x−y))cos(p*3z)−sin(p(x+y))sin(p*3z)
cos(pi.*(3.*x+y)).*cos(pi.*z)-sin(pi.*(3.*x-y)).*sin(pi.*z)+ cos(pi.*(x+3.*y)).*cos(pi.*z)+sin(pi.*(x-3.*y)).*sin(pi.*z)+ cos(pi.*(x-y)).*cos(pi.*3.*z)-sin(pi.*(x+y)).*sin(pi.*3.*z)
alternativ:
cos(3p*x)cos(p*y)cos(p*z)-sin(3p*x)sin(p*y)sin(p*z)+cos(p*x)cos(3p*y)*cos(p*z)-sin(p*x)sin(3p*y)sin(p*z)+cos(p*x)cos(p*y)cos(3p*z)-sin(p*x)sin(p*y)sin(3p*z)
cos(3.*pi.*x).*cos(pi.*y).*cos(pi.*z)-sin(3.*pi.*x).*sin(pi.*y).*sin(pi.*z)+ cos(pi.*x).*cos(3.*pi.*y).*cos(pi.*z)-sin(pi.*x).*sin(3.*pi.*y).*sin(pi.*z)+ cos(pi.*x).*cos(pi.*y).*cos(3.*pi.*z)-sin(pi.*x).*sin(pi.*y).*sin(3.*pi.*z) |
π | 0.25 |
| Gyroid |
cos(px)sin(py)+cos(py)sin(pz)+cos(pz)sin(px)
cos(2.*pi.*x).*sin(2.*pi.*y)+cos(2.*pi.*y).*sin(2.*pi.*z)+cos(2.*pi.*z).*sin(2.*pi.*x) |
2π | 0.25 |
| C (G) |
3(sin(px)cos(py)+sin(py)cos(pz)+cos(px)sin(pz))+2(sin(3px)cos(py)+sin(3py)cos(pz)+ cos(px)sin(3pz))−2(sin(px)cos(3py)+sin(py)cos(3pz)+cos(3px)sin(pz))
3.*(sin(2.*pi.*x).*cos(2.*pi.*y)+sin(2.*pi.*y).*cos(2.*pi.*z)+cos(2.*pi.*x).*sin(2.*pi.*z))+ 2.*(sin(3.*2.*pi.*x).*cos(2.*pi.*y)+sin(3.*2.*pi.*y).*cos(2.*pi.*z)+ cos(2.*pi.*x).*sin(3.*2.*pi.*z))-2.*(sin(2.*pi.*x).*cos(3.*2.*pi.*y)+ sin(2.*pi.*y).*cos(3.*2.*pi.*z)+cos(3.*2.*pi.*x).*sin(2.*pi.*z)) |
2π | 0.25 |
| S |
cos(2px)sin(py)cos(pz)+cos(px)cos(2py)sin(pz)+sin(px)cos(py)cos(2pz)
cos(2.*2.*pi.*x).*sin(2.*pi.*y).*cos(2.*pi.*z)+cos(2.*pi.*x).*cos(2.*2.*pi.*y).*sin(2.*pi.*z)+ sin(2.*pi.*x).*cos(2.*pi.*y).*cos(2.*2.*pi.*z) |
2π | 0.5 |
| C (S) |
(cos(2px)+cos(2py)+cos(2pz))+2(sin(3px)sin(2py)cos(pz)+cos(px)sin(3py)sin(2pz)+ sin(2px)cos(py)sin(3pz))+2(sin(2px)cos(3py)sin(pz)+sin(px)sin(2py)cos(3pz)+ cos(3px)sin(py)sin(2pz))
(cos(2.*pi.*2.*x)+cos(2.*pi.*2.*y)+cos(2.*2.*pi.*z))+ 2.*(sin(2.*pi.*3.*x).*sin(2.*pi.*2.*y).*cos(2.*pi.*z)+ cos(2.*pi.*x).*sin(2.*pi.*3.*y).*sin(2.*pi.*2.*z)+ sin(2.*pi.*2.*x).*cos(2.*pi.*y).*sin(2.*pi.*3.*z))+ 2.*(sin(2.*pi.*2.*x).*cos(2.*pi.*3.*y).*sin(2.*pi.*z)+ sin(2.*pi.*x).*sin(2.*pi.*2.*y).*cos(2.*pi.*3.*z)+ cos(2.*pi.*3.*x).*sin(2.*pi.*y).*sin(2.*pi.*2.*z)) |
2π | 0.25 |