
TPMS - Galerie 4
In dieser Galerie finden Sie für diverse TPMS (s. rechts) Einheitszellen (engl. unit cells) der Objekte
- TPMS mit ϕ (x,y,z) = 0 als 360°-Animation
- Sheet mit | ϕ (x,y,z) | ≤ d, d ∈ |R+
- Solid A mit ϕ (x,y,z) > 0
- Solid B mit ϕ (x,y,z) < 0
- TPMS mit ϕ (x,y,z) = cpinch (360°-Animation)
und ggf. weitere Grafiken. Bezüglich Nomenklatur siehe TPMS – Einführung.
Die TPMS-Flächen wurden mit dem Graphing Calculator 3D erzeugt (Funktion und Werte für d und cpinch s. Tabelle am Seitenende), für die "physikalischen" Modelle Sheet, Solid A und
Solid B wurde die Software MSLattice verwendet.
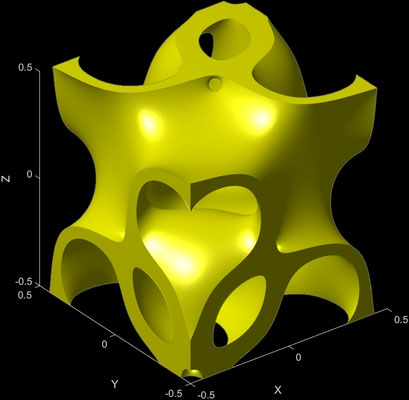
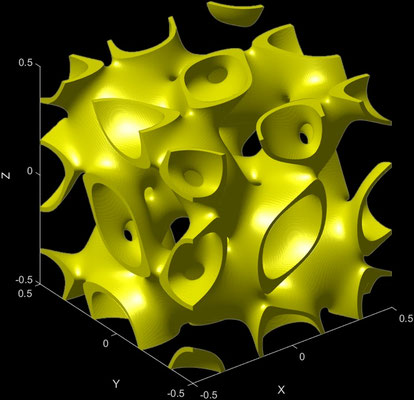
D'
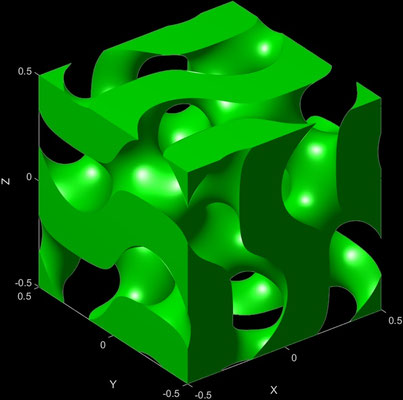
ϕ (x,y,z) = ½ (CxCyCz + CxSySz + SxCySz + SxSyCz) - ½ (S2xS2y + S2yS2z + S2zS2x) - 0.2
D' - TPMS, p=π

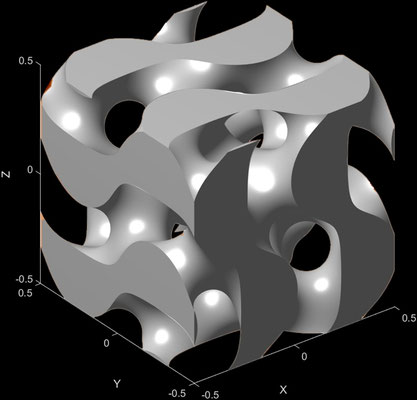
D' - Sheet, p=π
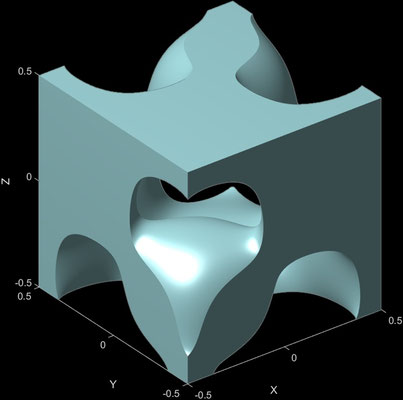
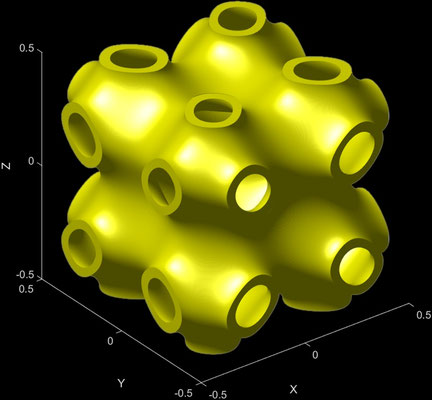
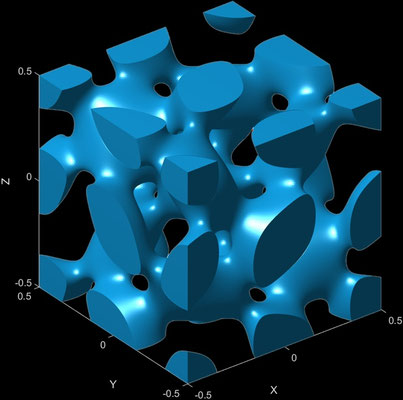
D' - Solid A, p=π
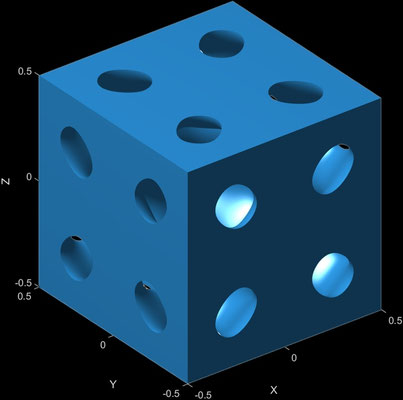
D' - Solid B, p=π
D'2 - TPMS
D' - TPMS, c = cpinch.a
D' - TPMS, c = cpinch.b
D' - TPMS, c = cpinch.c


D' - Sheet, p=2π
D' - Solid A, p=2π
D' - Solid B, p=2π
Variante: ϕ (x,y,z) = ½ (SxSySz + CxCyCz) – ½ (C2xC2y + C2yC2z + C2zC2x) – 0.2
D'2 - TPMS
D'2 - TPMS, c = cpinch.a
D'2 - TPMS, c = cpinch.b
D'2 - TPMS, c = cpinch.c


D'2 - Sheet
D'2 - Solid A
D'2 - Solid B
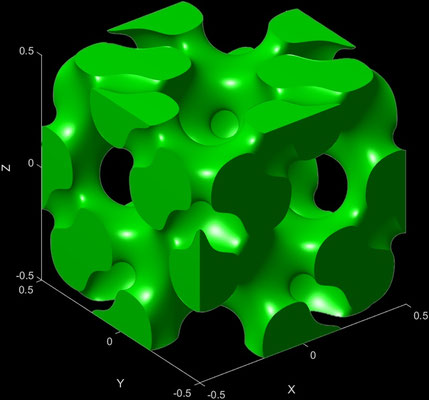
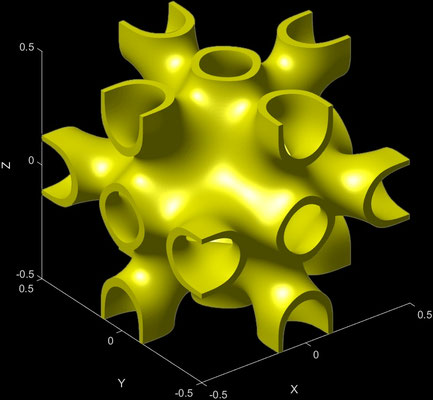
G' Surface
ϕ (x,y,z) = S2xCySz + SxS2yCz + CxSyS2z + 0.32
G' - TPMS
G' - TPMS, c = cpinch.a
G' - TPMS, c = cpinch.b
G' - TPMS, c = cpinch.c



G' - Sheet
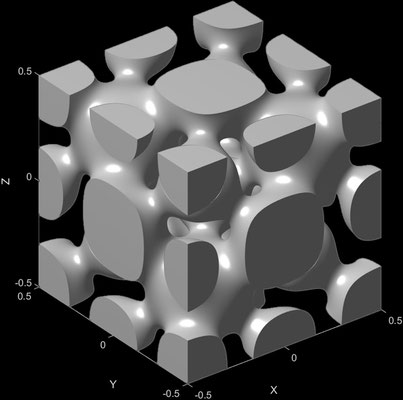
G' - Solid A
G' - Solid B
Variante: ϕ (x,y,z) = 5 (S2xCySz + SxS2yCz + CxSyS2z) + (C2xC2y + C2yC2z + C2zC2x)
G'2 - TPMS
G'2 - TPMS, c = cpinch.a
G'2 - TPMS, c = cpinch.b
G'2 - TPMS, c = cpinch.c

G'2 - Sheet
G'2 - Solid A
G'2 - Solid B
K Surface • Karcher K, KP
ϕ (x,y,z) = 0.3 (Cx + Cy + Cz) + 0.3 (CxCy + CyCz + CzCx) − 0.4 (C2x + C2y + C2z) + 0.2
K - TPMS
K - TPMS, c = cpinch.a
K - TPMS, c = cpinch.b

K - Sheet
K - Solid A
K - Solid B
Lidinoid • HG, L
ϕ (x,y,z) = S2xCySz + S2yCzSx + S2zCxSy − (C2xC2y + C2yC2z + C2zC2x) + 0.3
Lidinoid - TPMS
Lidinoid - TPMS, c = cpinch.a
Lidinoid - TPMS, c = cpinch.b
Lidinoid - TPMS, c = cpinch.c

Lidinoid - Sheet
Lidinoid - Solid A
Lidinoid - Solid B
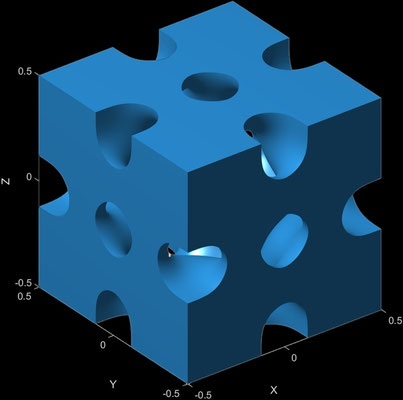
P+C(P) • PN
ϕ (x,y,z) = 0.3
(CxCyCz) + 0.2 (Cx + Cy + Cz) + 0.1 C2xC2yC2z + 0.1 (C2x +C2y
+C2z) +
0.05 (C3x + C3y + C3z) + 0.1 (CxCy +CyCz
+CzCx)
P+C(P) - TPMS
P+C(P) - TPMS, c = cpinch.a
P+C(P) - TPMS, c = cpinch.b

P+C(P) - Sheet
P+C(P) - Solid A
P+C(P) - Solid B
Die folgende Tabelle enthält die Funktionen und Parameter mit denen die Flächen und Festkörper auf dieser Seite erstellt wurden. Die für eine Fläche jeweils angegebene zweite Funktion enthält die Zeichenfolge ".*" für die multiplikative Verknüpfung und kann so direkt in MSLattice eingefügt werden. Falls nicht anders angegeben, ist jeweils p = 2π.
| TPMS | ϕTPMS | F(x,y,z) für MSLattice | d |
| D' |
0.5(cos(px)cos(py)cos(pz)+cos(px)sin(py)sin(pz)+sin(px)cos(py)sin(pz)+ sin(px)sin(py)cos(pz))-0.5(sin(2px)sin(2py)+sin(2py)sin(2pz)+sin(2pz)sin(2px))−0.2
cpinch.a = 0.362 cpinch.b = -0.106 cpinch.c = -0.699
0.5.*(cos(2.*pi.*x).*cos(2.*pi.*y).*cos(2.*pi.*z)+cos(2.*pi.*x).*sin(2.*pi.*y).*sin(2.*pi.*z)+ sin(2.*pi.*x).*cos(2.*pi.*y).*sin(2.*pi.*z)+sin(2.*pi.*x).*sin(2.*pi.*y).*cos(2.*pi.*z))- 0.5.*(sin(2.*pi.*2.*x).*sin(2.*pi.*2.*y)+sin(2.*pi.*2.*y).*sin(2.*pi.*2.*z)+ sin(2.*pi.*2.*z).*sin(2.*pi.*2.*x))-0.2 Variante: 0.5(sin(px)sin(py)sin(pz)+cos(px)cos(py)cos(pz))–0.5(cos(2px)cos(2py)+cos(2py)cos(2pz)+cos(2pz)cos(2px))–0.2
cpinch.a = 0.331 cpinch.b = -0.153 cpinch.c = -0.551
0.5.*(sin(2.*pi.*x).*sin(2.*pi.*y).*sin(2.*pi.*z)+cos(2.*pi.*x).*cos(2.*pi.*y).*cos(2.*pi.*z))- 0.5.*(cos(2.*pi.*2.*x).*cos(2.*pi.*2.*y)+cos(2.*pi.*2.*y).*cos(2.*pi.*2.*z)+ cos(2.*pi.*2.*z).*cos(2.*pi.*2.*x))-0.2 |
0.1
0.15
|
| G' |
sin(2px)cos(py)sin(pz)+sin(px)sin(2py)cos(pz)+cos(px)sin(py)sin(2pz)+0.32
cpinch.a = 0.319 cpinch.b = 1.319 cpinch.c = -0.494
sin(pi.*2.*x).*cos(pi.*y).*sin(pi.*z)+sin(pi.*x).*sin(pi.*2.*y).*cos(pi.*z)+ cos(pi.*x).*sin(pi.*y).*sin(pi.*2.*z)+0.32
Variante: 5(sin(2px)cos(py)sin(pz)+sin(px)sin(2py)cos(pz)+cos(px)sin(py)sin(2pz))+ (cos(2px)cos(2py)+cos(2py)cos(2pz)+cos(2pz)cos(2px))
cpinch.a = 2.999 cpinch.b = 3.999 cpinch.c = -4.429
5.*(sin(pi.*2.*x).*cos(pi.*y).*sin(pi.*z)+ sin(pi.*x).*sin(pi.*2.*y).*cos(pi.*z)+cos(pi.*x).*sin(pi.*y).*sin(pi.*2.*z))+ (cos(pi.*2.*x).*cos(pi.*2.*y)+cos(pi.*2.*y).*cos(pi.*2.*z)+ cos(pi.*2.*z).*cos(pi.*2.*x)) |
0.1 |
| K |
0.3(cos(px)+cos(py)+cos(pz))+0.3(cos(px)cos(py)+cos(py)cos(pz)+cos(pz)cos(px))− 0.4(cos(2px)+cos(2py)+cos(2pz))+0.2
cpinch.a = 0.299 cpinch.b = -0.471
0.3.*(cos(2.*pi.*x)+cos(2.*pi.*y)+cos(2.*pi.*z))+0.3.*(cos(2.*pi.*x).*cos(2.*pi.*y)+ cos(2.*pi.*y).*cos(2.*pi.*z)+cos(2.*pi.*z).*cos(2.*pi.*x))-0.4.*(cos(2.*2.*pi.*x)+ cos(2.*2.*pi.*y)+cos(2.*2.*pi.*z))+0.2 |
0.1 |
| Lidinoid |
(sin(2x)cos(y)sin(z)+sin(2y)cos(z)sin(x)+sin(2z)cos(x)sin(y))− (cos(2x)cos(2y)+cos(2y)cos(2z)+cos(2z)cos(2x))+0.3
cpinch.a = 0.299 cpinch.b = 1.873 cpinch.c = -0.347
sin(2.*pi.*2.*x).*cos(2.*pi.*y).*sin(2.*pi.*z)+sin(2.*pi.*2.*y).*cos(2.*pi.*z).*sin(2.*pi.*x)+ sin(2.*pi.*2.*z).*cos(2.*pi.*x).*sin(2.*pi.*y)-(cos(2.*pi.*2.*x).*cos(2.*pi.*2.*y)+ cos(2.*pi.*2.*y).*cos(2.*pi.*2.*z)+cos(2.*pi.*2.*z).*cos(2.*pi.*2.*x))+0.3 |
0.25 |
| P+C(P) |
0.3(cos(px)cos(py)cos(pz))+0.2(cos(px)+cos(py)+cos(pz))+ 0.1(cos(2px)cos(2py)cos(2pz))+0.1(cos(2px)+cos(2py)+cos(2pz))+ 0.05(cos(3px)+cos(3py)+cos(3pz))+0.1(cos(px)cos(py)+ cos(py)cos(pz)+cos(pz)cos(px))
cpinch.a = 0.174 cpinch.b = -0.134
0.3.*(cos(2.*pi.*x).*cos(2.*pi.*y).*cos(2.*pi.*z))+0.2.*(cos(2.*pi.*x)+cos(2.*pi.*y)+ cos(2.*pi.*z))+0.1.*(cos(2.*pi.*2.*x).*cos(2.*pi.*2.*y).*cos(2.*pi.*2.*z))+ 0.1.*(cos(2.*pi.*2.*x)+cos(2.*pi.*2.*y)+cos(2.*pi.*2.*z))+0.05.*(cos(2.*pi.*3.*x)+ cos(2.*pi.*3.*y)+cos(2.*pi.*3.*z))+0.1.*(cos(2.*pi.*x).*cos(2.*pi.*y)+ cos(2.*pi.*y).*cos(2.*pi.*z)+cos(2.*pi.*z).*cos(2.*pi.*x)) |
0.5 |